-
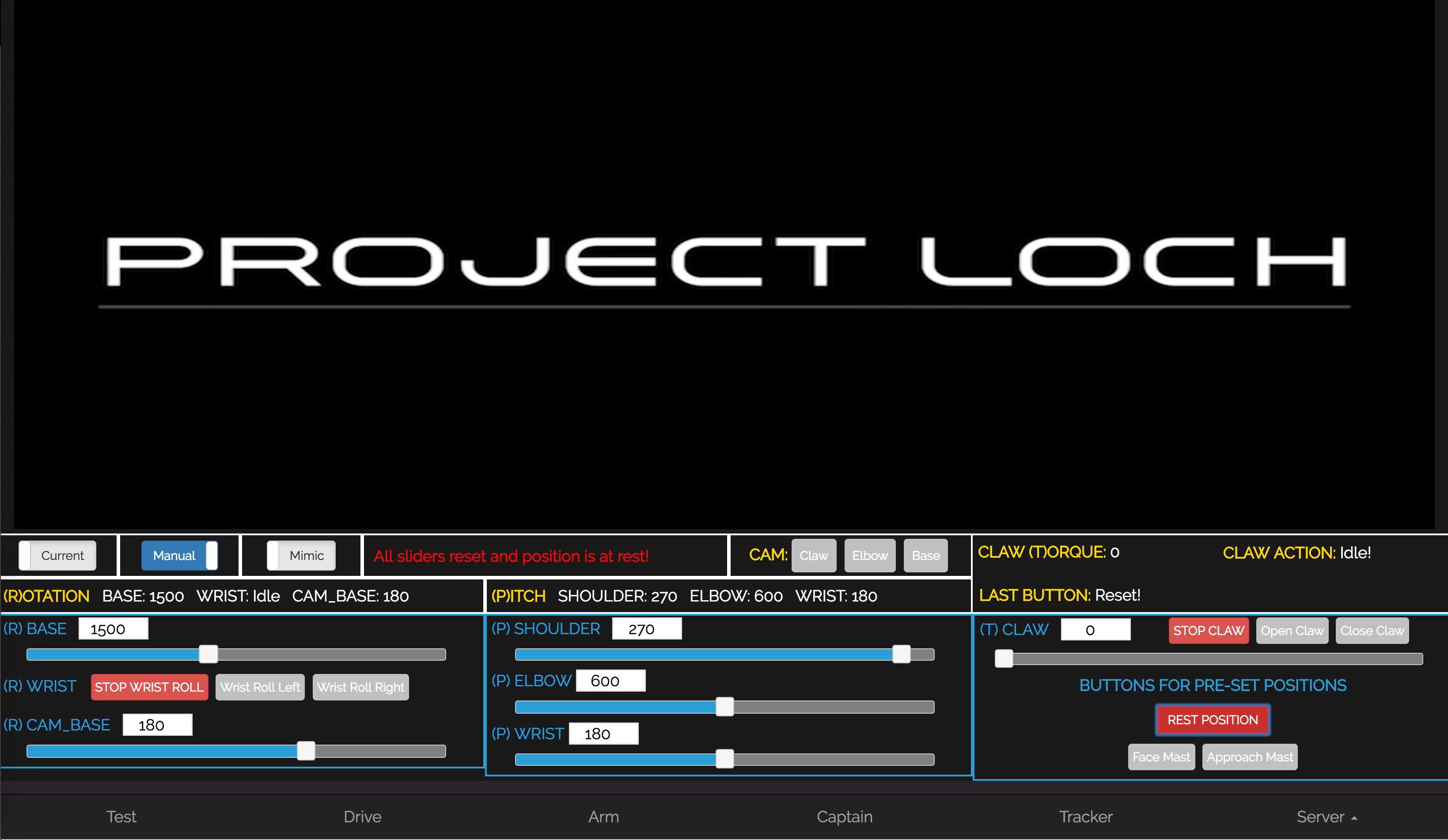
Final Arm & End Effector Interface with Manual (Page) Control enabled. The "PROJECT LOCH" image would be replaced with the selected camera feed.
-
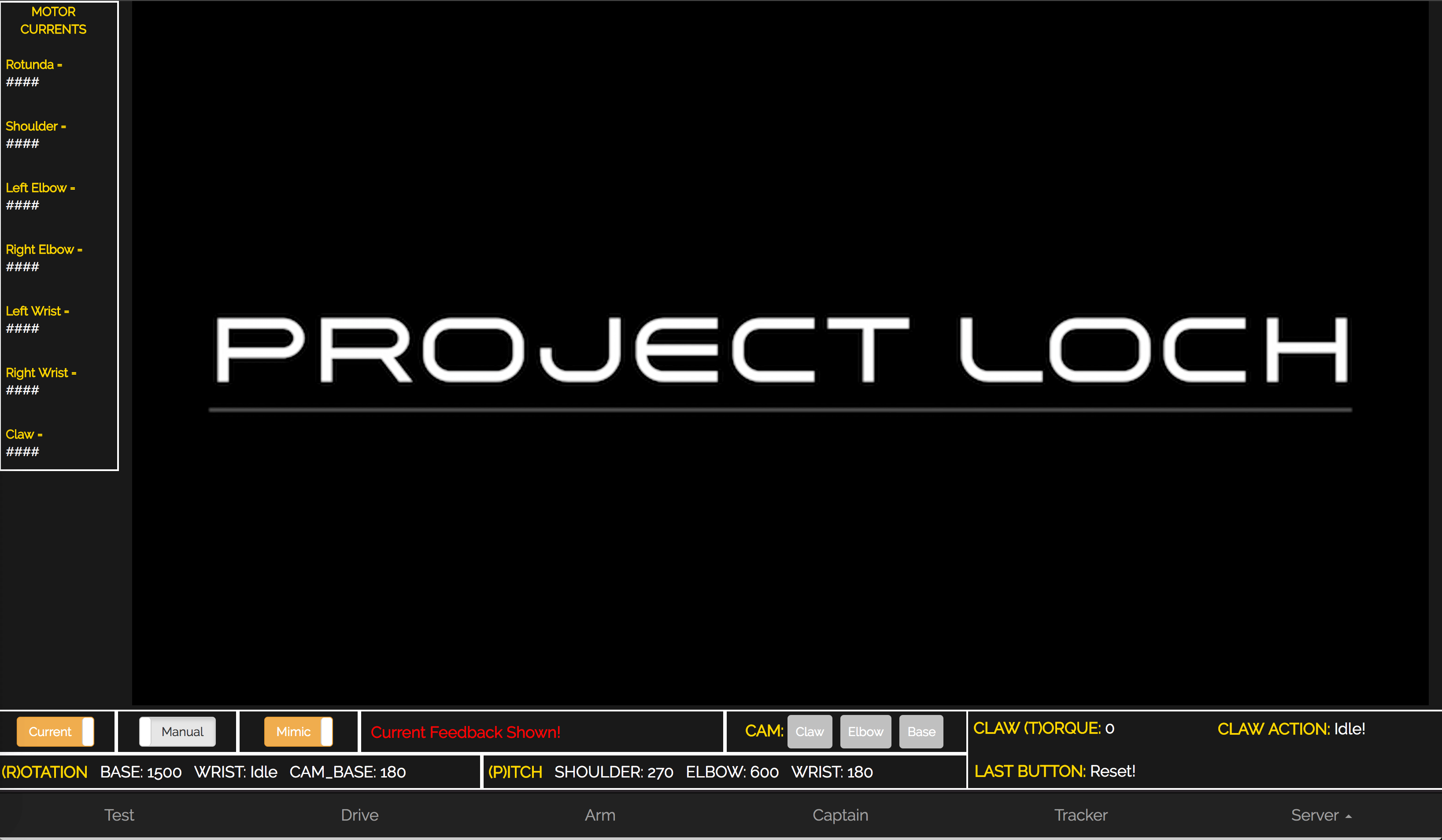
Final Arm & End Effector Interface with Mimic Control enabled. The "Mimic" is a 3D-printed representation of the Arm & End Effector that may also be used to control the actual rover arm. Control section is minimized with Mimic Control enabled to maximize user's camera view.
-
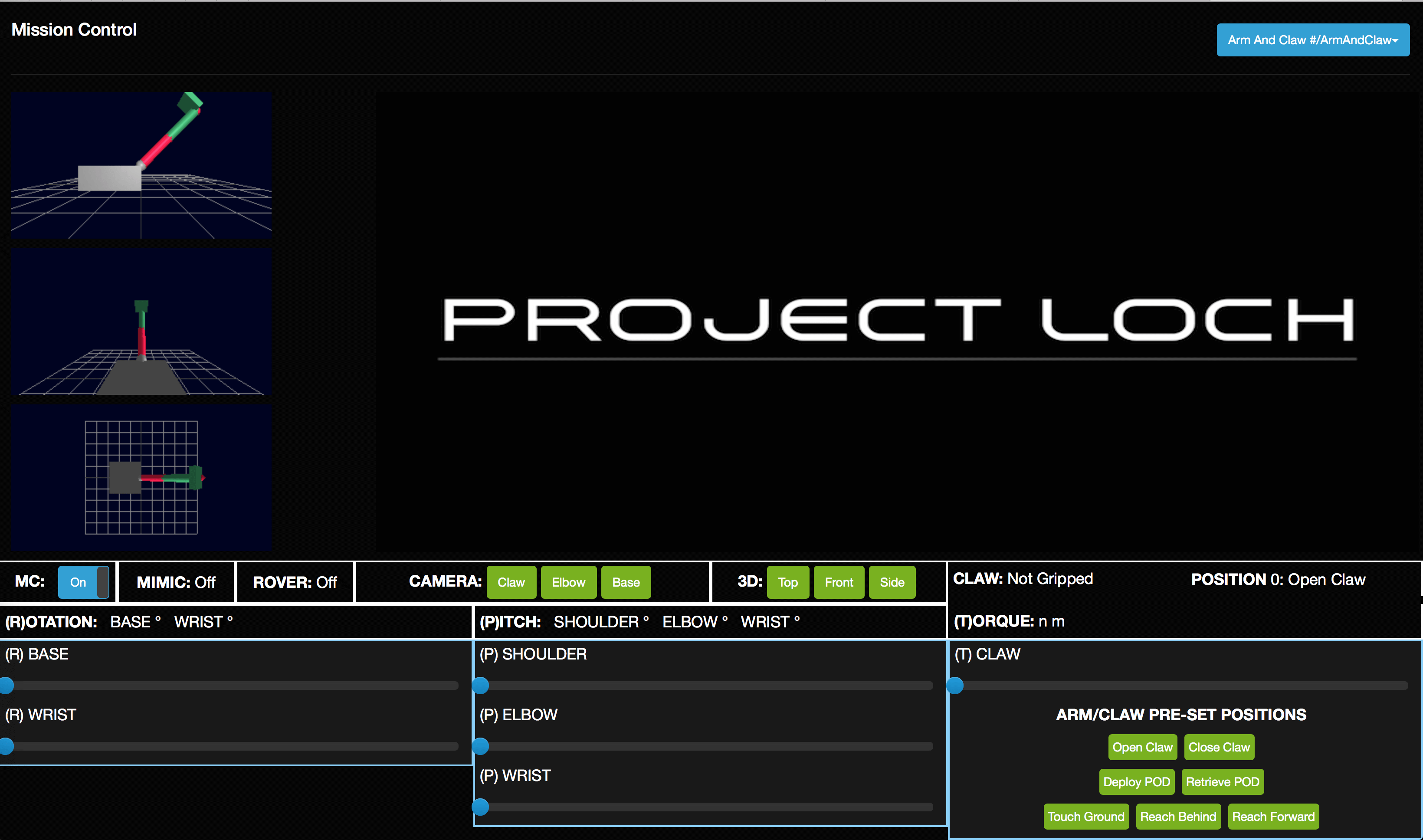
Original design for the Interface using ReactJS and three.js for 3D visualizations. Design was scrapped due to integration issues with the other Mission Control Interfaces.
-
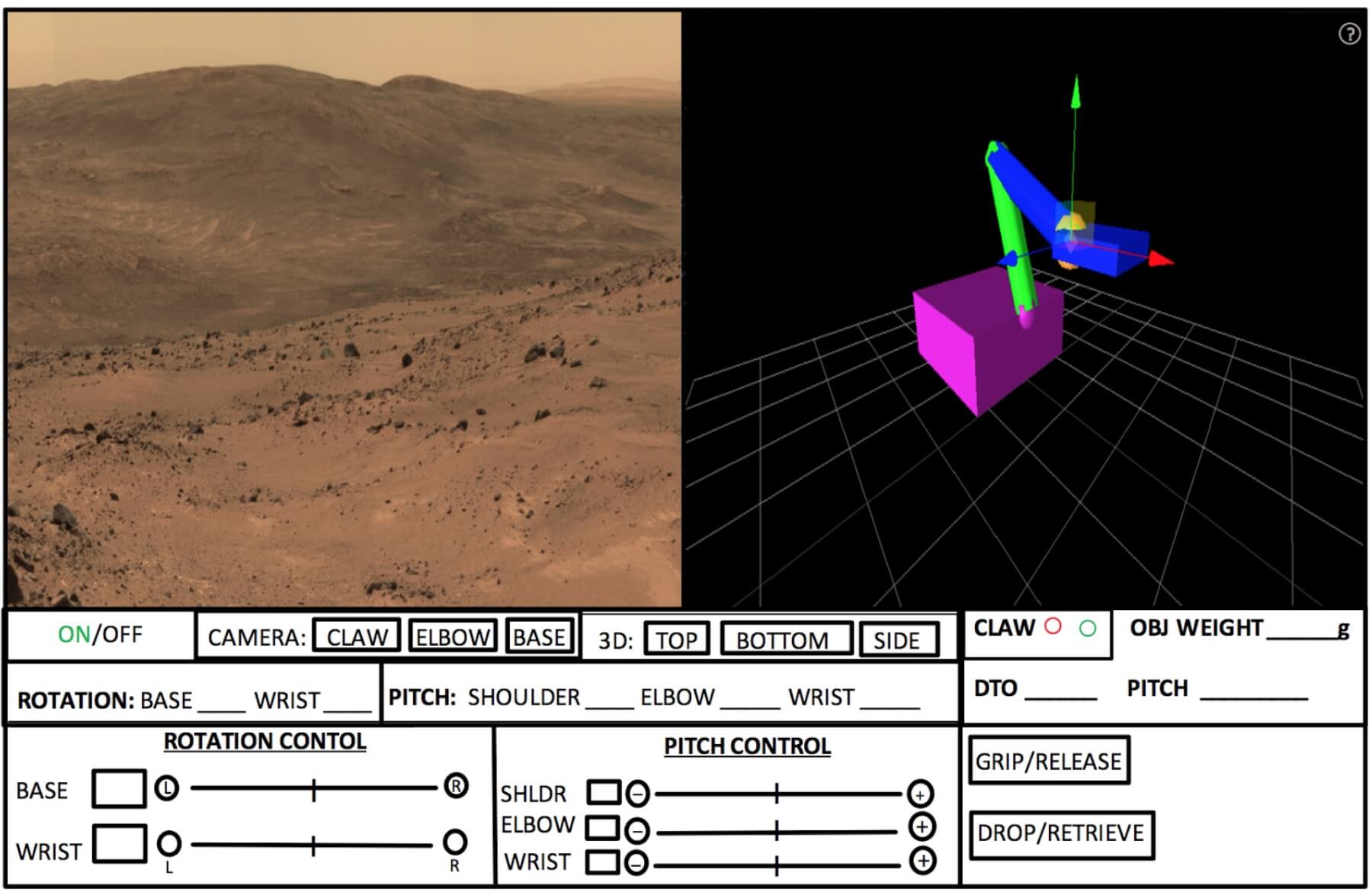
Original concept design for Arm & End Effector Interface.
-
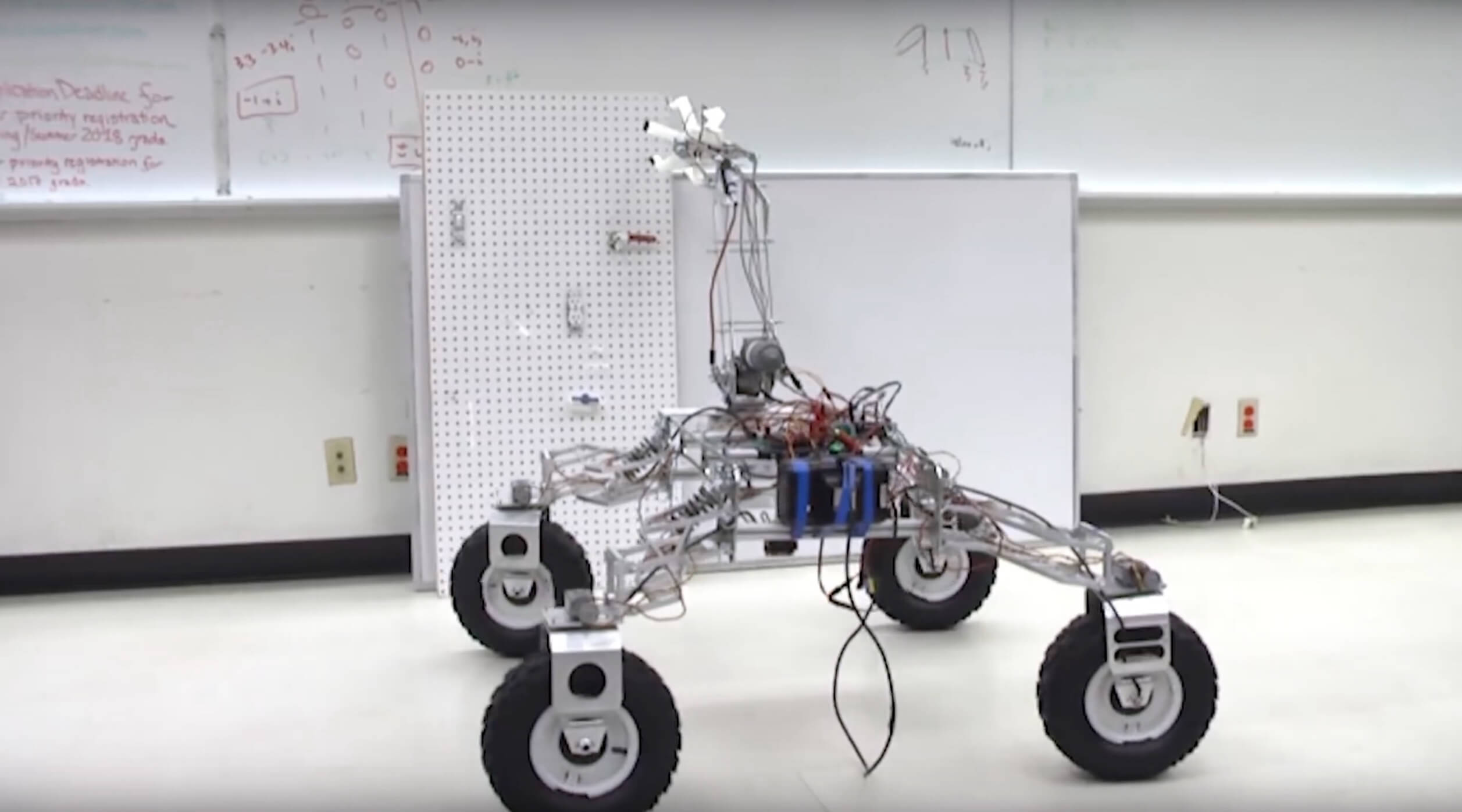
Testing Loch for similar tasks to be done during the University Rover Challenge.
-
Team structure for Project Loch, from sjsurobotics.org
-
Final Arm & End Effector Interface with Manual (Page) Control enabled. The "PROJECT LOCH" image would be replaced with the selected camera feed.
